




Mehaaniliste ekskavaatorite ohutus on seotud tehniliste meetmetega, millega kõrvaldatakse või vähendatakse suuri ohte, ohtlikke seisundeid või ohtlikke sündmusi pinnasekonstruktsioonide kasutamisel, käitamisel ja hooldamisel. Millised on mehaaniliste ekskavaatorite kontrollistandardid? Kuidas mehaanilisi ekskavaatoreid kontrollitakse?

Mehaaniline ekskavaator
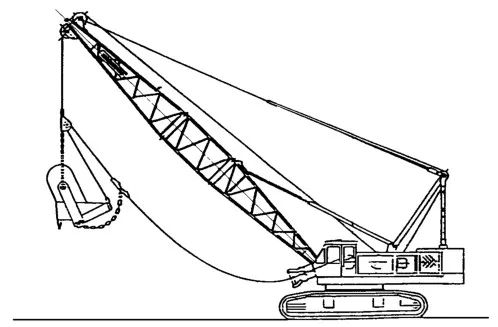
Mehaanilised ekskavaatorid viitavad ekskavaatoritele, mille ülemisi konstruktsioone juhitakse terastrossidega. Peamiselt kasutavad nad kaevetöödeks lohistamislabidaid, esilabidaid või haaratskoppaid; kasutage materjalide tampimiseks tampimisplaate; kasutage purustamiseks konkse või palle; ning kasutada spetsiaalseid tööseadmeid ja lisaseadmeid. Teostage materjali käitlemist.
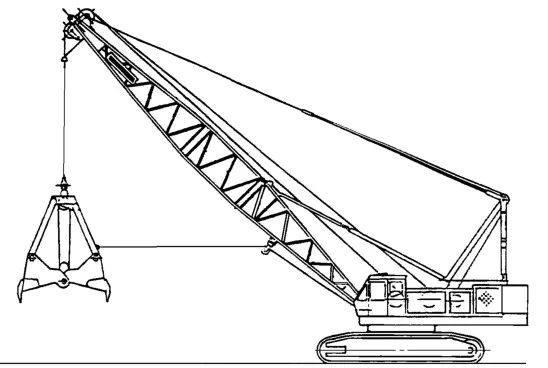
Roomikmehaaniline ekskavaator koos haaratsiseadmetega
Mehaaniline ekskavaatorülevaatuse standardi nõuded
01Mehaaniline ekskavaatori kontroll -juhi tööasendi kontroll
- Varustus
Juhikabiin tuleks paigaldada pealesõidumasina juhikohale.
Masinad, mille töömass on üle 1500 kg ja juhikoht, peaksid olema varustatud juhikabiiniga. Masinad, mille töömass on kuni 1500 kg, ei pea olema varustatud juhikabiiniga.
Pinnase teisaldusmasinad peaksid olema projekteeritud nii, et oleks tagatud piisavate kaitseseadiste paigaldamine, kui neid kasutatakse rakendustes, kus on lendava prahi oht (nt hüdraulika kasutamine).
- Minimaalne tegevusruum
Juhtide minimaalne liikumisruum peaks vastama standardile ISO 3411.
Juhikoha minimaalne ruum ja juhtseadiste asukoht peaksid vastama standardile ISO 6682
- Liikuvad osad
Tuleks ette näha meetmed, et vältida juhikoha juhuslikku kokkupuudet liikuvate osadega, nagu rattad, rihmad või tööseadmed või lisaseadmed.
- Mootori heitgaas
Mootori heitgaasid tuleb hoida juhist ja kabiini õhu sisselaskeavast eemal
- Juhiloa ost ja tagatisraha
Juhikoha lähedal peaks olema ruum juhi käsiraamatu või muude kasutusjuhendite ohutuks hoidmiseks. Kui juhi asukohta ei saa lukustada või juhikabiini pole, peaks ruum olema lukustatav.
- Teravad servad
Juhi tööalal (nagu lagi, sisemine näidikupaneel ja läbipääs juhi kohale) ei tohiks olla teravaid servi ega nurki.
- Kliimatingimused juhikohal
Juhikabiin peaks kaitsma juhti prognoositavate ebasoodsate ilmastikutingimuste eest. Ettevalmistused ventilatsioonisüsteemide, reguleeritavate küttesüsteemide ja klaasisulatussüsteemide jaoks tuleks paigaldada vastavalt eeskirjadele.
- Kõvad torud ja voolikud
Kabiin on varustatud vedeliku rõhuga üle 5 MPa või temperatuuriga üle 60 C ja voolikutega.
- Põhilised sisse- ja väljapääsud
Varustatakse põhiline juurdepääsuava, mille mõõtmed peavad vastama standardile ISO 2867.
- vahelduv sisse- ja väljapääs
Alternatiivne sissepääs/väljapääs peab olema esmasest sissepääsust/väljapääsust erineval küljel. Selle mõõtmed peavad vastama standardile ISO 2867. See võib olla aken või muu uks, mida saab avada või liigutada ilma võtmete või tööriistadeta. Kui sissepääsu saab seestpoolt avada ilma võtme või tööriistadeta, kasutage riivi. Sobivateks alternatiivseteks väljapääsudeks võib pidada ka purunevaid sobiva suurusega klaasuksi ja -aknaid, eeldusel, et vajalik evakuatsioonihaamer on kabiinis ja juhi käeulatuses.
- Ventilatsioonisüsteem
Ventilatsioonisüsteem peaks suutma varustada juhikabiini värsket õhku voolukiirusega vähemalt 43 m/h. Filtreid tuleb katsetada vastavalt standardile SO 10263-2.
- Sulatussüsteem
Sulatussüsteem peaks pakkuma esi- ja tagaakna sulatusseadmeid, näiteks küttesüsteemi või spetsiaalse sulatusseadme kaudu.
-Ülelaadimissüsteem
Kui on ette nähtud survesüsteemiga kabiin, tuleb survesüsteemi katsetada vastavalt standardi SO 10263-3 sätetele ja see peab tagama suhtelise siserõhu, mis ei ole väiksem kui 50 Pa.
- Uksed ja aknad
Uksed, aknad ja klapid peavad olema kindlalt kinnitatud ettenähtud tööasendisse. Uksi ettenähtud tööasendis peavad hoidma jäigad turvasüsteemid, mis on ette nähtud põhisissepääsu ja -väljapääsu ohutuks avamiseks ettenähtud tööasendis, ning turvasüsteemid peaksid olema juhikohalt või juhi sissepääsuplatvormilt kergesti vabastatavad.
Autoaknad tuleks paigaldada turva- või muude materjalidega, millel on sama ohutus.
Esiaknad peaksid olema varustatud elektriliste klaasipuhastite ja pesuritega.
Aknapesuri veepaak peaks olema kergesti ligipääsetav.
- Sisevalgustus
Juhikabiin peaks olema varustatud fikseeritud sisemise valgustusseadmega, mis peaks ka pärast mootori seiskamist töötama, et oleks võimalik juhi asukohta valgustada ja kasutusjuhendit lugeda.
- Juhi kaitsekilp
Mehaanilised ekskavaatorid peaksid suutma paigaldada juhile kaitsekonstruktsioone (ülemised ja esikaitsed). Tootja peaks pakkuma kaitsekonstruktsioone (ülemised ja esikaitsed), mille peaks kasutaja valima olemasolevate kasutusriskide põhjal.
- Kukkuvate objektide kaitsekonstruktsioon (FOPS)
Välja arvatud standardis ISO3449 sätestatud erandid, peaksid ruudukujulised kraanad, mida kasutatakse kohtades, kus on oht kukkuvate esemete eest, olema projekteeritud nii, et oleks võimalik paigaldada kukkuvate objektide kaitsekonstruktsioon (FOPS).
02Mehaanilise ekskavaatori ülevaatus -Juhi juhtseadised ja näidikud
- Käivitage ja peatage seade
Mullateisaldusmasinad peaksid olema varustatud käivitus- ja seiskamisseadmetega (nt võtmed) ning käivitussüsteem peaks olema varustatud kaitseseadistega, et vältida volitamata kasutamist.
Pinnase teisaldusmasinad peavad olema konstrueeritud nii, et mootori käivitamisel või seiskamisel ei oleks masinat, tööseadmeid ja lisaseadmeid võimalik liigutada ilma käivitusseadmeteta.
-Ootamatu operatsioon
Juhtseadised, mis võivad juhusliku käitamise tõttu ohtu põhjustada, tuleks paigutada või keelata või kaitsta vastavalt riskide minimeerimise põhimõttele. Eelkõige peaks juht asendisse sisenemisel ja sealt väljumisel olema iseaktiveeruv seade, mis juhtimisseadme välja lülitab, või seda sunniviisiliselt stimuleerivad ja aktiveerivad asjakohased seadmed.
- pedaali pedaal
Nende vahel peaks olema sobiv suurus, kuju ja piisav vahemaa. Turvised peavad olema libisemiskindla pinnaga ja kergesti puhastatavad. Kui mullatöömasinate pedaalidel ja autode pedaalidel on samad funktsioonid (sidur, pidurdamine ja kiirendus), tuleks segunemisest tuleneva ohu vältimiseks pedaalid paigutada ühtemoodi.
- Lisaseadmete hädamaandumine
Kui mootor seiskub, peaks olema võimalik:
· Langetage tööseade/kinnitus maapinna/resti külge;
· Tööüksuse/lisaseadme langetamine on nähtav asendist, kus juht aktiveerib langetamise juhtnupu:
· Kõrvaldage igas töö- ja lisaseadmete hüdraulika- ja pneumaatilises ahelas jääkrõhk, mis võib põhjustada riske. Lisaseadmete langetamise sätted ja vahendid jääkrõhu eemaldamiseks võivad asuda väljaspool juhi asukohta ja neid tuleb kirjeldada juhi käsiraamatus.
- Kontrollimatu liikumine
Masinate ja tööseadmete või lisaseadmete liikumist fikseeritud asenditest, välja arvatud juhul, kui seda juhib juht, libisemise või aeglustumise (nt lekke tõttu) või toitekatkestuse tõttu, tuleb juhtida vahemikus, mis ei tekita ohtu kokkupuutuvatele isikutele.
- Visuaalsed näidikud/juhtpaneelid, indikaatorid ja sümbolid
· Juht peaks nägema vajalikke signaale masina normaalse töö kohta nii päeval kui öösel juhi kohalt. Pimestamist tuleks minimeerida.
· Masina normaalse töö ja ohutuse kontrollindikaatorid peavad vastama standardi ISO 6011 ohutuse ja sellega seotud küsimuste sätetele.
· Mullatöömasinate visuaalsete näidikute/juhtimisseadmete sümbolid peavad vastama standardi ISO 6405-1 või S 6405-2 sätetele.
- Sõiduautode juhtseadmed, mis ei ole ette nähtud maapinnalt juhtimiseks, peavad olema varustatud vahenditega, mis minimeerivad juhtimisseadme maapinnalt tõstmise võimalust.
- Mittesõitvad masinad peaksid olema varustatud hoidmisseadmega, mis peatab masina töö ja seadme ohtliku liikumise, kui juht vabastab kontrolli. Juhtseadised peavad olema konstrueeritud nii, et need võtaksid arvesse masina juhusliku liigutamise ohtu operaatori poole.
03Mehaaniline ekskavaatori kontroll -roolisüsteemi ülevaatus
- Roolisüsteem peaks tagama, et roolimismanööver on kooskõlas punktis määratletud kavandatud juhtimissuunagaISO 10968.
- Edasi/tagasi rihmaga kaetud masinad Kiirusega üle 20 km/h sõitva rihmaga kaetud masina roolisüsteem peaks olema õrn.
04Mehaaniline ekskavaatori kontroll -pöördepidurisüsteemi kontroll
Mehaanilised ekskavaatorid peaksid olema varustatud pöörde- ja seisupidurisüsteemidega.
05Mehaaniline ekskavaatori kontroll -tõstesüsteemi kontroll
- sunnitud juhtimine (tõstmine/langetamine)
Mehaanilise ekskavaatori tõstesüsteem peaks olema varustatud piduriga. Pidur tuleb aktiveerida kohe pärast käepideme või pedaali vabastamist. Pidurisüsteem peaks automaatselt aktiveeruma võimsuse kadumise või sunnitud juhitavuse languse korral ega tohiks mõjutada ekskavaatori töö stabiilsust. Pidurdamine Süsteem peaks suutma säilitada punktis 4.8 määratletud nimikoormust
- Vabalangemise operatsioon
Mehaanilise ekskavaatori tõstesüsteem peab olema varustatud piduriga ja aktiveeruma kohe järgmistel tingimustel:--pedaali vastav töö;
Vabastage käsihoob.
Pidurid peavad olema konstrueeritud nii, et need pidurdaksid pidevalt liikuvat koormust.Juhis peaks olema konstrueeritud nii, et see takistaks trossi tõusmist või kontrolli alt väljumist.
- Lüliti
Sundjuhtimisrežiimilt vabalangemisele üleminekul ei tohiks koormus langeda.
- buum
Mehaanilise ekskavaatori noole peaks äkilise mahalaadimise korral olema kaitstud tagasilöögi eest. Tagurpidi ülekoormuse vältimiseks peaks poom olema varustatud piirlülitiga.
Poomi erinevate osade vahelised ühendused (poldid) peaksid olema konstrueeritud nii, et need võimaldavad paigaldamist ja eemaldamist ilma, et personal peaks poomi all seisma.
- Tross
Tuleks kindlaks määrata ekskavaatori mehaanilise trossi ohutustegur.
-Traattrossi trummel ja trossiratas
· Trossitrumlite ja trossirataste projekteerimine ja valmistamine peaks vältima terastrossi kahjustamist ning terastrossi juhtpuksi libisemist või eraldumist.
· Trossitrumli läbimõõdu ja terastrossi läbimõõdu suhe peaks olema vähemalt 20:1.
· Trossi rihmaratta läbimõõdu ja trossi soone juurest mõõdetud trossi läbimõõdu suhe peaks olema vähemalt 22:1. Välja arvatud tõmbejõujuhikud, juhtrattad ja abitrossid.
· Purustusvelg, vintsi trumli serv peab olema vähemalt 1,5 korda suurem kui terastrossi läbimõõt.
06Mehaaniline ekskavaatori kontroll -piiramisseadme kontroll
-Koormusmomendi piiraja
Materjalikäitlustingimustes peaks tõstesüsteem ja poomi tõstesüsteem olema varustatud koormusmomendi piirajaga, et vältida ülekoormust. Koormusmomendi piiraja tuleks seadistada punktis 4.8 määratletud nimikoormusele, tolerantsiga 10%. Pärast koormusmomendi piiraja kasutamist tuleb koormusmomenti vähendada. 4.7.2 Tõstke piirlüliti üles.
Materjali käitlemise tingimustes peaksid mehaanilised ekskavaatorid olema varustatud tõsteliigutuste piirlülititega. Pärast piirlüliti aktiveerimist peaks poom saama langetada.
- Poomi tõstesüsteemi piirlüliti
Mehaanilise ekskavaatori nooletõstesüsteem peaks olema varustatud piirlülitiga, et vältida noole vastupidist ülekoormamist. Pärast piirlüliti aktiveerimist peaks poom saama langetada.
07Mehaaniline ekskavaatori kontroll -stabiilsuskontroll
- Projekteeritud ja valmistatud pinnase teisaldusmasinad koos tööseadmete ja lisaseadmetega, sealhulgas lisaseadmetega, peavad tagama piisava stabiilsuse tootja poolt juhi käsiraamatus määratletud hooldus-, montaaži-, lahtivõtmis- ja transporditingimustes. Seadmed, mida kasutatakse mullatöömasinate stabiilsuse suurendamiseks töörežiimis, peaksid olema varustatud blokeeringu või ühesuunalise ventiiliga, mis hoiab voolikut paigal, kui see ebaõnnestub või saab õli täis.
- Veojõukopp, mehaanilise ekskavaatori töövõime tõmbevardaga töötamisel peab olema väiksem kahest järgmisest:
a) 75% arvestuslikust ümberminekukoormusest P;
b) Vintsi maksimaalne tõstevõime.
Draglaini kopa mahutavuse kalibreerimise määrab kindlaks tootja
- Haarats ja labidas
Mehaanilise ekskavaatori töövõime haaratsi ja labida tingimustes peaks olema väiksem kahest järgmisest:
· 66% arvestusliku ümberminekukoormuse P alusel;
· Vintsi maksimaalne tõstevõime.
Labida kandevõime kalibreerimine määratakse vastavalt standardile ISO 7546 ja haaratskopa kandevõime kalibreerimise määrab tootja.
Postitusaeg: 19. detsember 2023